Eating Oreo cookies by twisting the two halves and separating them to get to the cream is a childhood memory most Americans have. The process of picking up the cookie, separating the two halves and removing the cream is simple enough if you’re a human being, but if you’re a robot, it’s another matter entirely.
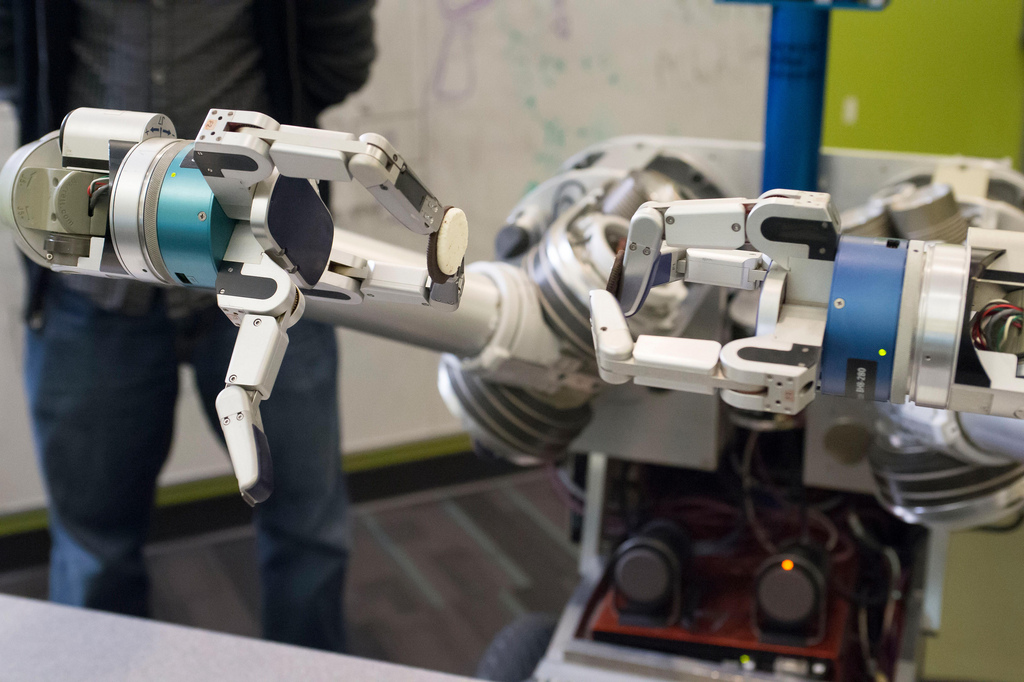
But why would you want a robot to separate your Oreo cookie and remove the cream? The answer, of course, is not about the Oreo; it’s about the process involved in getting a robot to perform what seems like a very simple task. Researchers at The Personal Robotics Lab at The Robotics Institute at Carnegie Mellon University have been working on a robot capable of performing this and many other tasks as a butler.
Home Exploring Robotic Butler (HERB) is the end result of hard work and determination by the brilliant group at Carnegie Mellon. The machine was designed to address an aging population that is living longer than ever before, and requires around-the-clock care. Hiring people to perform this task is prohibitively expensive, so HERB was put on the drawing board to see if it was possible to create something capable of functioning in a home environment successfully.
Cleaning is the biggest request individuals have when asked what they would want a robot to do in their home. Again, daily household chores are simple enough for us. But if you’re elderly with physical limitations, it becomes very difficult, and if you’re a robot, it’s that much more difficult.
The difficulty in assigning these tasks to a robotic system is manipulation in human environments requires many different tasks, including navigation, mapping, object recognition, pose estimation and trajectory planning. Besides the hardware, an algorithm capable of considering every possible scenario and performing the right action must be created. Easier said than done, though, as there are almost a limitless amount of scenarios that could take place in a household in a span of just one minute.
HERB can move around its environment and perform tasks by sensing, planning and executing. First, it senses its environment and provides a static snapshot to the planning system. The planning system then uses different algorithms, including geometry and kinematics, to create a plan for conquering obstacles and meeting the constraints of the task. The execution system follows the plan compensating for any possible errors.
Researchers implemented this three-stage framework so each stage can have a different set of algorithms to perform the required task. Although the concept is simple, execution is extremely difficult, having been a seven-year journey for Prof. Srinivasa and his enthusiastic group of researchers to reach this stage.
The lab responsible for creating HERB was founded by Prof. Siddhartha Srinivasa in 2006, with funding from Intel (News  - Alert) Pittsburgh and the Quality of Life Technologies NSF ERC.
- Alert) Pittsburgh and the Quality of Life Technologies NSF ERC.
“The focus of our group has been the development of an autonomous mobile manipulation platform that can perform sophisticated manipulation tasks in human environments at human-like speeds,” he said. “Our goal is to create a robotic system that can reliably perform routine tasks within the home or office and perform these tasks quickly enough that the person who requested them is not frustrated.”
Edited by Braden Becker
 Internet Telephony Magazine
Click here to read latest issue
Internet Telephony Magazine
Click here to read latest issue CUSTOMER
CUSTOMER  Cloud Computing Magazine
Click here to read latest issue
Cloud Computing Magazine
Click here to read latest issue IoT EVOLUTION MAGAZINE
IoT EVOLUTION MAGAZINE



